Touch based Dexterous Manipulation Robot Arm-Hand System
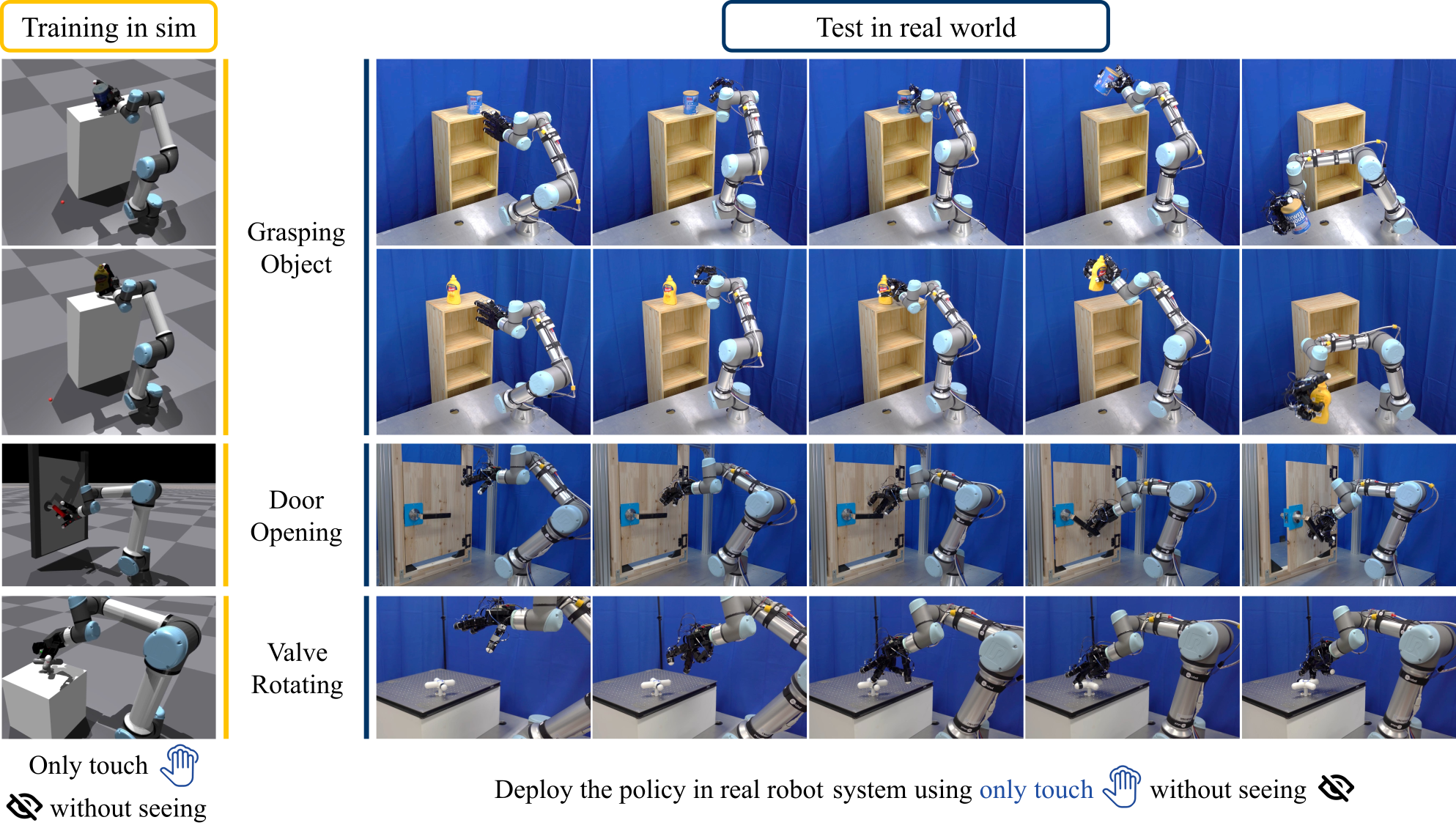
We propose DexTouch, a novel dexterous manipulation robotic system to perform three types of daily-life tasks with only tactile information. On the left, we show our manipulation tasks in simulation. A robotic system, consisting of a UR5e robotic arm and an Allegrohand with 16 attached touch sensors, was studied in both simulation and real environments. Our trained policy can be directly deployed in a real robotic arm-hand system and can successfully perform the tasks.
Dexterous Manipulation Task: Grasping Object
Seen Target Objects
Bleach Cleanser
Coffee Can
Mustard Container
Box of Sugar
Uneen Target Objects
Chips Can
Glass Cleanser
Tumbler
Demonstration for different object position and orientation
Comparison with Baselines
In experiments, our method is mainly compared with the following baselines. WO-Sensor (Without-Sensor): This policy is learned without any tactile information from the robot. LQ-Sensor (Low Quality-Sensor): The threshold of the tactile sensor to detect touch was set to 0.3 N. DA-Sensor (Deactivation-Sensor): The tactile information is disabled during evaluation.